Welcome to TinyMPC's documentation!
![]()
![]()
TinyMPC is an open-source solver tailored for convex model-predictive control that delivers high speed computation with a small memory footprint. Implemented in C++ with minimal dependencies, TinyMPC is particularly suited for embedded control and robotics applications on resource-constrained platforms. TinyMPC can handle state and input bounds and second-order cone constraints. Python, MATLAB, and Julia interfaces are available to aid in generating code for embedded systems.
🏆 TinyMPC won the Best Paper Award in Automation and was a finalist for Best Conference Paper Award and Best Student Paper Award at IEEE ICRA 2024! Thank you to everyone who has used TinyMPC and provided feedback!
Robot demonstrations
TinyMPC contributes to bridging the gap between computationally intensive convex model-predictive control and resource-constrained processing platforms. Integrating TinyMPC into computationally underpowered robots enables them to execute agile maneuvers and exhibit safe behavior. TinyMPC-Crazyflie firmware is available at RExLab and A²R Lab.
Dynamic obstacle avoidance
TinyMPC runs fast enough to enable re-linearizing constraints at each time step, allowing it to reason about moving obstacles. On the left, a virtual sphere centered at the end of the stick is linearized into a new set of hyperplane constraints at each time step. The algorithm can additionally handle any number of arbitrary linear constraints. On the right, for example, it is avoiding the end of the stick while staying in the yz plane.
Extreme pose recovery
TinyMPC can enable recovering from extreme initial conditions. In this example, it is compared against three of the Crazyflie 2.1's stock controllers. Only TinyMPC was able to reason about the control limits, thereby exibiting a clean-cut recovering maneuver.
Figure-8 tracking
We compared against the same stock controllers for an infeasible fast figure-8 tracking task (the time given to complete a single figure-8 could only be met if the drone was much more powerful). TinyMPC and PID were able to stay upright, but TinyMPC's trajectory more closely resembled a figure-8.
Microcontroller benchmarks
TinyMPC outperforms state-of-the-art solvers in terms of speed and memory footprint on microcontroller benchmarks. Numerical benchmarks on MCUs are available at RExLab.
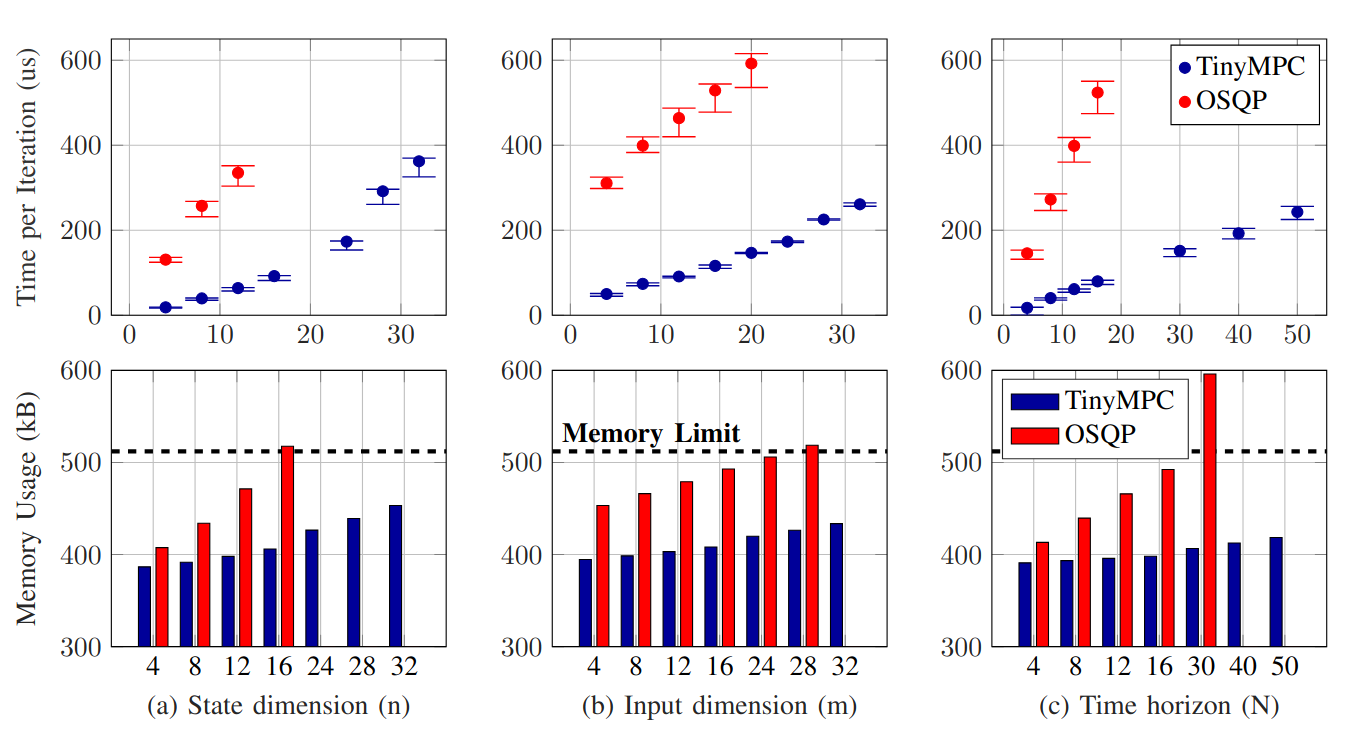
Here, we solve randomly generated QP-based MPC problems and compare iteration times and memory footprint against OSQP. TinyMPC exibits a maximum speed-up of 8x over OSQP with much less memory.
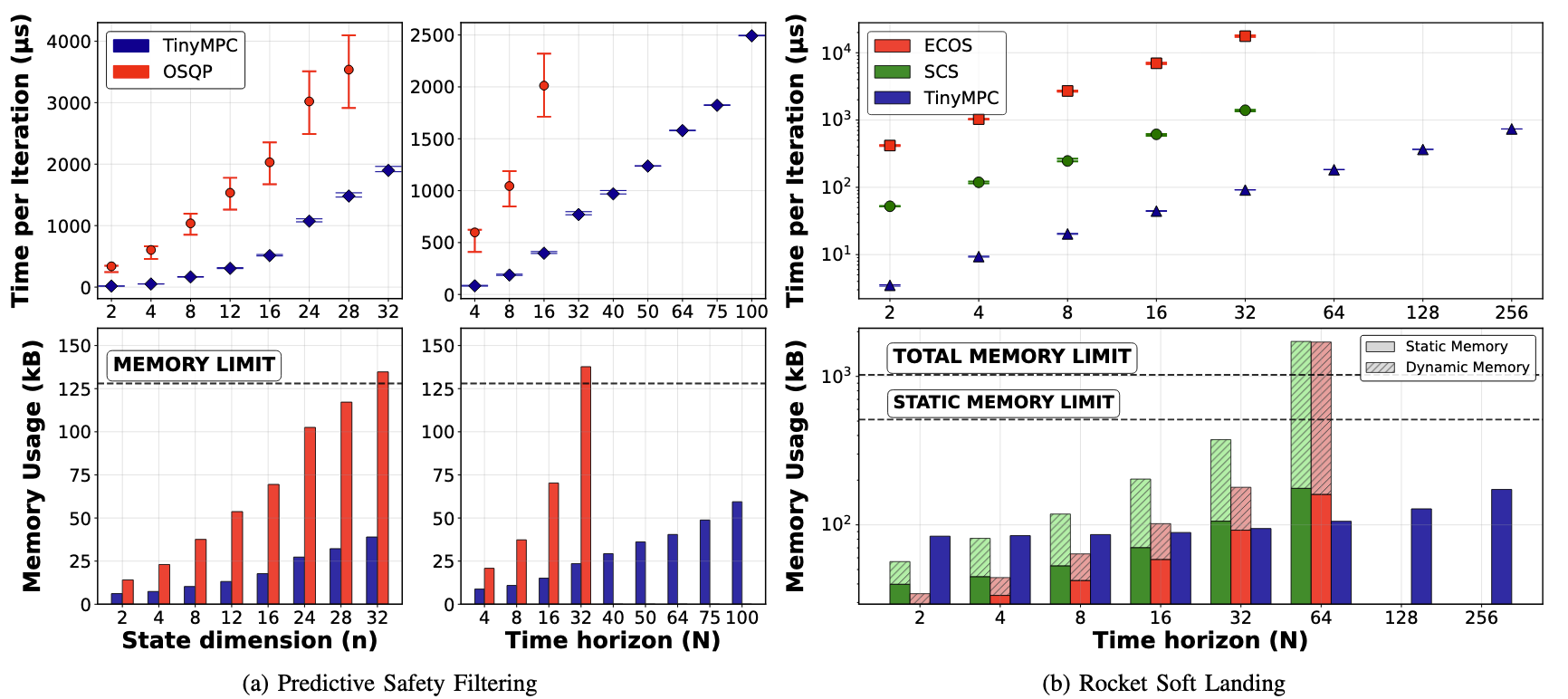
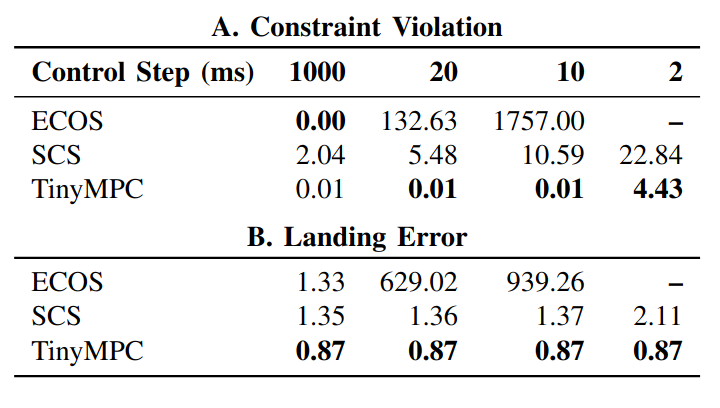
Real-time control requires a solver to return a solution within a strict time window. We compared TinyMPC's trajectory tracking performance against SCS and ECOS on the rocket soft-landing problem while artificially changing the amount of time available for each solve. TinyMPC violates constraints less and has lower tracking error than SCS and ECOS at all control durations.
Made by
Khai Nguyen

Sam Schoedel

Ishaan Mahajan

Anoushka Alavilli

Elakhya Nedumaran
Moises Mata

Prof. Brian Plancher

Prof. Zac Manchester
Citing
@inproceedings{tinympc,
title={TinyMPC: Model-Predictive Control on Resource-Constrained Microcontrollers},
author={Khai Nguyen and Sam Schoedel and Anoushka Alavilli and Brian Plancher and Zachary Manchester},
booktitle={IEEE International Conference on Robotics and Automation (ICRA)},
year={2024},
}
@inproceedings{tinympc-adaptive,
title={Robust and Efficient Embedded Convex Optimization through First-Order Adaptive Caching},
author={Ishaan Mahajan and Brian Plancher},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year={2025},
}
@inproceedings{conic-tinympc,
title={Code Generation and Conic Constraints for Model-Predictive Control on Microcontrollers with Conic-TinyMPC},
author={Ishaan Mahajan and Khai Nguyen and Sam Schoedel and Elakhya Nedumaran and Moises Mata and Brian Plancher and Zachary Manchester},
booktitle={IEEE International Conference on Robotics and Automation (ICRA)},
year={2026},
}
@inproceedings{tinysdp,
title={TinySDP: Real Time Semidefinite Optimization for Certifiable and Agile Edge Robotics},
author={Ishaan Mahajan and Jon Arrizabalaga and Andrea Grillo and Fausto Vega and James Anderson and Zachary Manchester and Brian Plancher},
booktitle={Robotics: Science and Systems (RSS)},
year={2026},
}